客户输入:9 秒手机视频
上传文件 sd1768614503_2.MP4 · 户外公共广场 / 古城门 / 游客街区。真实付费试单建议拍 30 秒到 5 分钟。
原始视频
竖屏 720×1280,约 9.14 秒。
关键帧拼图
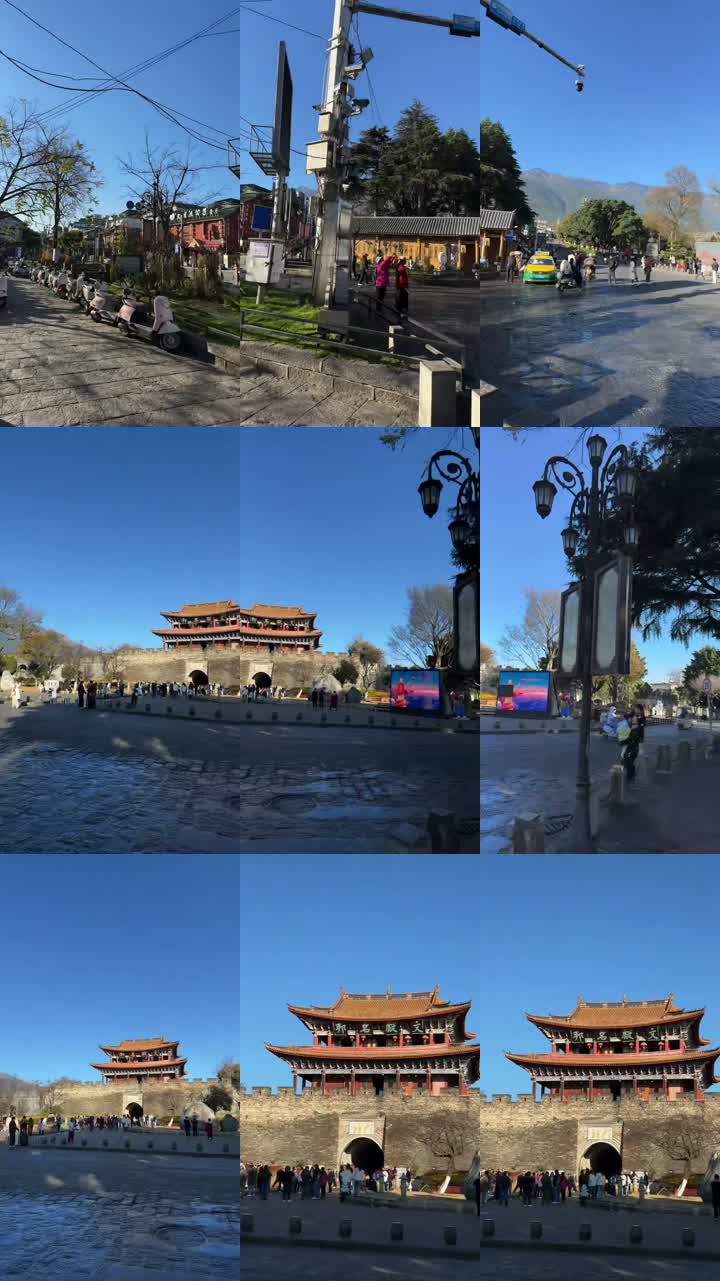
可见:古城门、石板路、游客人群、街灯、路桩、招牌、路侧车辆区域。
真实公共空间视频输入,输出服务机器人 / 巡逻机器人可用的场景理解、导航任务和仿真导出结构。这一页展示的是 AI pipeline 生成、可继续进入 Pilot 的数据层样例。
上传文件 sd1768614503_2.MP4 · 户外公共广场 / 古城门 / 游客街区。真实付费试单建议拍 30 秒到 5 分钟。
竖屏 720×1280,约 9.14 秒。
可见:古城门、石板路、游客人群、街灯、路桩、招牌、路侧车辆区域。
这不是仓库。更准确的客户故事是文旅园区 / 公共广场 / 古城街区里的服务机器人、巡逻机器人、配送机器人。
这类客户最关心:机器人能不能识别可行走区域、绕开人群和障碍物、在真实公共空间里安全移动。
客户拿到的是可验收、可讨论、可继续导入仿真的 scene data package:视频证据、语义标签、导航 / 碰撞摘要、任务约束和导出结构。
在广场绕行,避开游客、路桩、街灯,禁止进入车辆区域。
从广场边缘移动到城门附近,在人群密集区前安全停下。
生成公共空间里的地面、人群、城墙、路桩、招牌分割数据。
客户可以先看的数据结构。真实 Pilot 会在素材验收后 48–72 小时交付首版,并在这套结构上补真实 3D 重建、尺度标定和引擎导出。
给我们一段真实公共空间视频,AI pipeline 先判断输入质量和重建风险,再输出机器人团队能评估、能导入仿真的场景数据包。